
Clamp Type Oldham Coupling
Clamp Type Oldham Coupling — split-hub clamp fixation for superior shaft grip, zero backlash, high torsional stiffness. Rated torque 0.7–80 N·m, max speed 9,000 rpm, radial misalignment up to 3.9 mm, angular tolerance 3°. 8 sizes (EP6C-16 to EP6C-70). Stocked and shipped Australia-wide by GBC.
GBC6C Series Clamp Type Oldham Coupling — Zero Backlash Precision Flexible Coupling with Superior Shaft Retention
The GBC6C Series Clamp Type Oldham Coupling is a high-precision aluminium alloy three-piece flexible coupling engineered for servo motor, CNC, and encoder applications requiring zero backlash, high torsional stiffness, and the ability to accommodate large parallel and angular shaft misalignment. The distinguishing feature of the GBC6C series is its clamp-style split hub — a slotted hub bore compressed by a clamping bolt — which delivers 360° concentric shaft engagement, higher shaft retention force, and the ability to install or remove hubs without rotating or marking the shaft. Rated torque ranges from 0.7 to 80 N·m, maximum speeds reach 9,000 rpm, and radial misalignment compensation extends to 3.9 mm across the 8-size range from GBC6C-16 to GBC6C-70.
Core Product Parameters at a Glance
0.7 – 80 N·m
1.4 – 160 N·m
Up to 9,000 rpm
1.0 – 3.9 mm
3.0° (all sizes)
Zero
Clamp Type (Split Hub)
GBC6C-16 to GBC6C-70 (8 sizes)
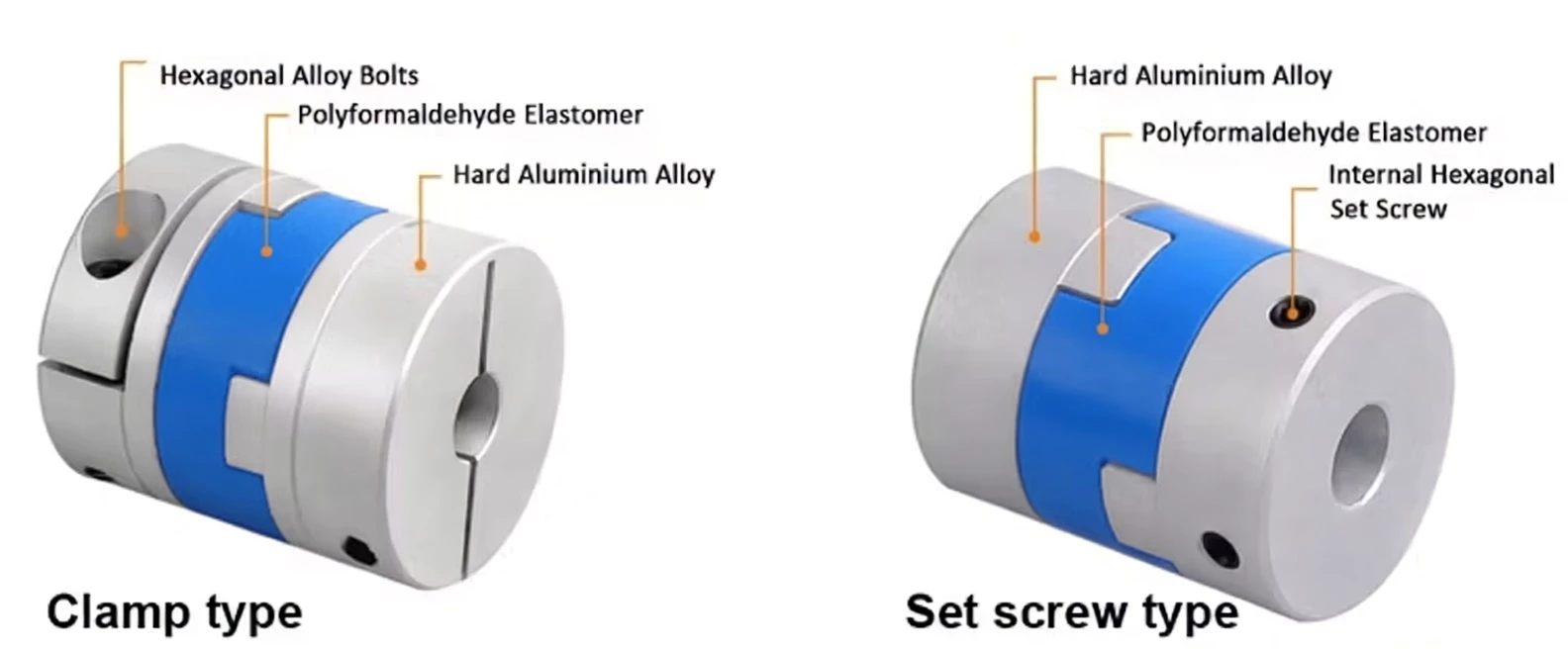
Clamp Type vs Setscrew Type: Why the Hub Retention Method Matters
The GBC6C series shares the same Oldham coupling kinematic design and aluminium alloy construction as the GBC6 setscrew series, but the hub retention method is fundamentally different — and in many servo and CNC applications, that difference is decisive.
| Feature | GBC6C — Clamp Type | GBC6 — Setscrew Type |
|---|---|---|
| Shaft Contact | 360° concentric grip | Single-point contact |
| Shaft Marking Risk | None | Possible (point contact) |
| Hub Removal | Without rotating shaft | May require shaft rotation |
| Concentricity | Higher — full bore engagement | Dependent on setscrew torque |
| Shaft Retention Force | Higher | Moderate |
| Outer Diameter for Same Bore | Slightly larger (split slot adds width) | More compact |
| Recommended For | Servo axes, encoders, frequent changeover | Fixed assembly, space-constrained |
Key Features of the GBC6C Series Clamp Oldham Coupling
Precision-machined tongue-and-slot interface between the intermediate disc and each hub maintains zero lost motion between input and output shafts, preserving positioning accuracy in closed-loop servo systems.
The slotted split-hub bore grips the shaft over its full circumference when the clamping bolt is tightened, providing higher retention force and better concentricity than point-contact setscrew designs. No shaft marking, no keyway required in most applications.
Static torsional stiffness from 29 N·m/rad (GBC6C-16) to 1,600 N·m/rad (GBC6C-70). High stiffness minimises angular lag in servo positioning loops and preserves dynamic accuracy during rapid acceleration and deceleration.
Accommodates up to 3.9 mm radial offset and 3.0° angular misalignment across the range — significantly greater than bellows or disc couplings of comparable size, reducing the precision requirements for motor mount alignment.
The polymer intermediate disc electrically isolates the two coupled shafts, breaking stray current paths that would otherwise damage encoder bearings, servo windings, and adjacent electronics — a critical protection feature in VFD and servo drive environments.
Clamp hubs are installed and removed with a single hex key bolt — no special pullers or shaft rotation required. The intermediate disc slides out radially for inspection or replacement without disturbing the shaft position reference.
What Is an Oldham Coupling?
An Oldham coupling is a three-piece flexible mechanical coupling that transmits rotary motion between two parallel shafts that are laterally offset from one another. The assembly consists of two outer hubs — each attached to one of the rotating shafts — and a central intermediate disc (the slider) with perpendicular tongue slots on each face that engage matching tongues on each hub. As the assembly rotates, the intermediate disc slides continuously within these slots to accommodate any radial (parallel) offset between the shaft centrelines, while maintaining a constant 1:1 velocity ratio between input and output — this is the defining kinematic property of the Oldham mechanism.
The engineering problem that drives Oldham coupling adoption is straightforward: perfect shaft alignment between a motor and a load is rarely achieved or permanently maintained in real machinery. Motor mounting tolerances, thermal expansion, bearing wear, and structural deflection under load all introduce some degree of lateral offset between connected shafts. A rigid coupling transmits this offset as a bending moment into shaft bearings, seals, and neighbouring components, accelerating wear and causing premature failure. An Oldham coupling intercepts that offset kinematically at the floating intermediate disc, keeping the lateral force path clean and bearing loads predictable.
What sets the Oldham design apart from elastomeric couplings — such as jaw or spider-type units — is its essentially rigid torque path and zero-backlash characteristic. There is no elastic element to fatigue, creep under sustained load, or change stiffness with temperature. The intermediate disc handles the sliding compensation function without introducing torsional compliance, angular velocity variation, or stored elastic energy into the drive train. For servo motor shaft connections, encoder couplings, and CNC auxiliary drives in Australian automation and machine tool applications, this combination of zero backlash and large misalignment tolerance is the primary selection rationale for the GBC6C series.

How Does the GBC6C Clamp Type Oldham Coupling Work?
Each aluminium alloy hub carries a single raised rectangular tongue on its inner face, machined to close tolerances. The intermediate disc carries two perpendicular slots — one on each face — that receive these tongues as a precision sliding fit. When the drive hub rotates, its tongue pushes the disc linearly in one direction; the disc simultaneously slides in the perpendicular direction relative to the driven hub. The net output is torque transmission at a constant 1:1 velocity ratio. The centre of the intermediate disc orbits through a small circle with a diameter equal to the radial offset between the two shaft axes — this is the kinematic compensation mechanism operating continuously throughout each revolution.
For the GBC6C series, radial misalignment compensation ranges from 1.0 mm on the GBC6C-16 up to 3.9 mm on the GBC6C-70. Angular misalignment tolerance is 3.0° across all eight sizes — a high angular tolerance for a zero-backlash coupling that substantially reduces the precision requirements for motor mount alignment in Australian servo and automation installations. Maximum operating speeds range from 9,000 rpm (GBC6C-16) to 2,200 rpm (GBC6C-70), with static torsional stiffness from 29 N·m/rad to 1,600 N·m/rad scaling with frame size.
In servo positioning systems and CNC drives, zero backlash is a non-negotiable requirement: any lost motion in the coupling appears directly as a positioning error in the closed-loop control system. The GBC6C's rigid tongue-and-slot torque path and clamp-style hub fixation — which prevents any micro-rotation of the hub on the shaft under reversing loads — both contribute to maintaining the fixed angular relationship between motor shaft and load that the control system depends on. The low rotational inertia of the aluminium alloy assembly, as low as 5.0 x 10⁻⁷ kg·m² on the GBC6C-16, also minimises reflected inertia at the servo drive, enabling tighter current and velocity loop tuning.
Specifications & Material Options
All published dimensional and performance data for the GBC6C series are listed in the tables below. Moment of inertia and mass figures are based on the maximum shaft bore for each size. Use this data for initial size selection and servo drive inertia matching calculations.
GBC6C — [Outside Diameter] — [d1 Bore][d2 Bore]
Example: GBC6C-32-1014 = GBC6C Clamp Type Series, 32 mm outside diameter, d1 bore 10 mm, d2 bore 14 mm.
The outside diameter selects the frame size and torque capability. Specify d1 and d2 bores to match your drive and driven shaft diameters. Mixed bore combinations (different d1 and d2) are standard.
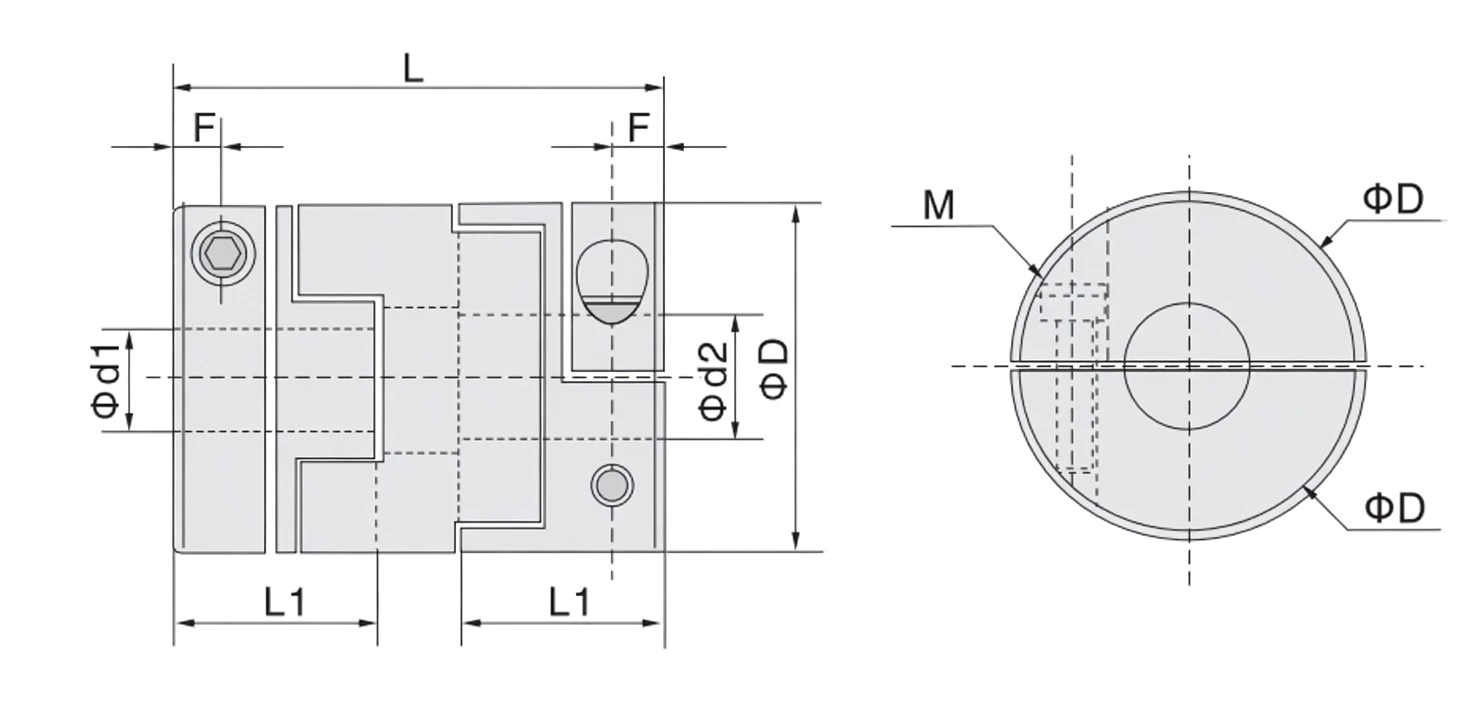
GBC6C Series — Dimensions (mm)
| Model | Bore d1, d2 (mm) | OD / D (mm) | L (mm) | F (mm) | L1 (mm) | M (Clamp Bolt) | Wrench Torque (N·m) |
|---|---|---|---|---|---|---|---|
| GBC6C-16 | 4, 5, 6 | 16 | 30 | 3.0 | 13 | M2.5 | 0.7 |
| GBC6C-20 | 6, 6.35, 8 | 20 | 33 | 3.0 | 14 | M2.5 | 1.7 |
| GBC6C-25 | 6.35, 8, 9.525, 10 | 25 | 39 | 3.8 | 17 | M3 | 4.0 |
| GBC6C-32 | 8, 9.525, 10, 11, 12, 14 | 32 | 45 | 4.5 | 19 | M4 | 7.0 |
| GBC6C-40 | 12, 14, 15, 16 | 40 | 50 | 7.0 | 23 | M5 | 7.0 |
| GBC6C-50 | 14, 15, 16, 18, 19, 20 | 50 | 58 | 8.0 | 27 | M6 | 15 |
| GBC6C-63 | 16, 18, 19, 20, 24, 25 | 63 | 71 | 10 | 33 | M8 | 30 |
| GBC6C-70 | 25, 28, 30, 32, 35 | 70 | 77 | 12 | 35 | M8 | 35 |
GBC6C Series — Technical Specifications
Note: Moment of inertia and mass figures are based on the maximum shaft bore for each size.
| Model | Rated Torque (N·m) | Max Torque (N·m) | Max Speed (rpm) | Moment of Inertia (kg·m²) | Static Torsional Stiffness (N·m/rad) | Radial Misalignment (mm) | Angular Misalignment (°) | Mass (g) |
|---|---|---|---|---|---|---|---|---|
| GBC6C-16 | 0.7 | 1.4 | 9,000 | 5.0 x 10⁻⁷ | 29 | 1.0 | 3.0 | 12 |
| GBC6C-20 | 1.6 | 3.2 | 7,400 | 1.4 x 10⁻⁷ | 58 | 1.4 | 3.0 | 20 |
| GBC6C-25 | 3.0 | 6.0 | 5,800 | 4.1 x 10⁻⁸ | 125 | 1.9 | 3.0 | 36 |
| GBC6C-32 | 5.5 | 11.0 | 4,700 | 1.2 x 10⁻⁴ | 260 | 2.4 | 3.0 | 66 |
| GBC6C-40 | 9.0 | 18.0 | 3,600 | 3.8 x 10⁻⁵ | 505 | 2.8 | 3.0 | 114 |
| GBC6C-50 | 19.0 | 38.0 | 3,000 | 1.0 x 10⁻⁴ | 780 | 3.3 | 3.0 | 206 |
| GBC6C-63 | 33.0 | 66.0 | 2,400 | 3.5 x 10⁻⁴ | 1,200 | 3.8 | 3.0 | 454 |
| GBC6C-70 | 80 | 160 | 2,200 | 2.1 x 10⁻⁴ | 1,600 | 3.9 | 3.0 | 560 |
Material Options
All GBC6C hubs are aluminium alloy as standard. The high strength-to-weight ratio keeps coupling inertia low — essential for servo and encoder applications where reflected inertia directly affects drive loop bandwidth. The clamp-style split hub design is machined with close bore tolerances and a precision clamp slot to ensure consistent clamping force and shaft concentricity across the full wrench torque range.
Standard intermediate disc material for the GBC6C series. Lightweight, electrically insulating, and self-lubricating. Provides the electrical isolation between drive and driven shafts that protects encoder bearings and servo electronics from stray current damage. Suitable for the majority of servo and automation applications within the standard operating temperature range.
Specified for applications requiring maximum torsional stiffness or where extended maintenance intervals are needed in high-cycle-count environments. Higher rigidity and lower moisture absorption than nylon maintains consistent tongue-slot clearance in humid food processing or washdown environments. Available for GBC6C-32 and larger sizes on request.
Available on request for food processing, pharmaceutical, and marine applications where aluminium alloy is unsuitable due to corrosive washdown chemistry or regulatory requirements. Grade 304 and 316 options available. Note that stainless steel hubs increase coupling mass and inertia — confirm servo drive inertia ratio before specifying in high-dynamic applications.
Prefer a setscrew hub for a more compact envelope? Or need a higher torque coupling for a heavier drive? Browse the complete GBC coupling range, including the GBC6 setscrew series and WH/SL Type Oldham couplings for torque requirements up to 63,000 N·m.

Industry Applications in Australia
The GBC6C Series Clamp Type Oldham Coupling is the coupling of choice wherever the advantages of clamp-style hub retention — superior shaft grip, no marking, and shaft-position-preserving hub removal — are needed alongside the zero-backlash and misalignment compensation characteristics of the Oldham design.
The GBC6C-16 and GBC6C-20 sizes are the standard choice for servo motor shaft to ball screw connections in Australian robotics cells, Cartesian gantries, and linear motion systems. The clamp hub's full-circumference grip eliminates any micro-slip under reversing loads that would otherwise introduce cumulative position error over production cycles.
Connecting rotary encoders to machine shafts is one of the highest-demand applications for GBC6C couplings in Australia. The clamp hub allows encoder removal and reinstallation without rotating the machine shaft — preserving the absolute position reference in single-turn encoder systems and eliminating the need to re-home the axis after encoder maintenance.
CNC machining centre axis servo motor connections in Australian manufacturing frequently specify the GBC6C series for its combination of zero backlash, electrical isolation protecting encoder electronics from cutting-current paths, and the ability to change couplings during scheduled maintenance without disturbing the axis home reference.
High-cycle servo axes on Australian packaging and filling machinery experience tens of millions of direction reversals over a production lifetime. The GBC6C clamp hub's resistance to micro-rotation on the shaft under repeated reversing torque ensures consistent label placement and fill volume accuracy is maintained without scheduled coupling re-tightening.
Precision positioning systems in Australian medical imaging, laboratory automation, and scientific instrument manufacturing specify the GBC6C series for its compact size, repeatable zero-backlash torque path, and electrical isolation properties. The clamp hub's non-marking engagement is important where polished or precision-ground motor shafts must not be damaged during coupling installation or removal.
Wafer handling robots, pick-and-place machines, and PCB drilling systems in Australian electronics manufacturing require sub-micron repeatability from their servo axes. The GBC6C's zero-backlash clamp hub design and electrical isolation contribute directly to the positioning repeatability and signal integrity needed in these high-precision production environments.
GBC6C Clamp Oldham Coupling vs Other Coupling Types
The following comparison covers the key selection parameters for the GBC6C against three coupling types commonly evaluated alongside it in Australian precision drive procurement.
| Parameter | GBC6C Oldham (Clamp) | Jaw Coupling | Bellows Coupling | Disc Coupling |
|---|---|---|---|---|
| Parallel Offset Compensation | Excellent (up to 3.9 mm) | Limited (0.1–0.5 mm) | Low (0.1–0.3 mm) | Very Low (<0.1 mm) |
| Angular Misalignment | 3.0° (all sizes) | Moderate (1°–2°) | Good (1°–3°) | Low (0.5°–1°) |
| Backlash | Zero | Low–Moderate | Near Zero | Near Zero |
| Electrical Insulation | Yes (polymer disc) | Yes (spider) | No | No |
| Torsional Stiffness | High (29–1,600 N·m/rad) | Low–Moderate | Very High | Very High |
| Shaft Non-marking | Yes — clamp grip | Depends on type | Yes (clamp type) | Yes (clamp type) |
| Max Speed | Up to 9,000 rpm | Up to 6,000 rpm | Up to 10,000+ rpm | Up to 10,000+ rpm |
| Relative Cost | Moderate | Low | High | High |

Why Source Your GBC6C Clamp Type Oldham Couplings from GBC Australia?
For Australian OEM machine builders, systems integrators, and maintenance engineering teams, supplier reliability, technical depth, and the ability to support custom specifications without excessive lead times are all critical factors alongside the product specification itself.
GBC6C Series couplings are manufactured under an ISO 9001 certified quality management system with documented controls for precision clamp hub bore machining, tongue profile tolerances, and clamp slot geometry. Products comply with RoHS substance restrictions. CE conformity documentation and material test certificates (MTCs) are available on request for compliance-critical applications.
We support custom bore diameters (metric and imperial), keyway profiles (parallel, Woodruff, DIN, AS/NZS), alternative intermediate disc materials, stainless steel hubs, and surface treatments including hard anodising and electroless nickel plating. Minimum order quantity for custom specifications is 5 pieces, with lead time of 7–15 business days from drawing confirmation. Volume OEM programmes with scheduled releases are available.
Our Australian-based engineering and sales team responds within one business day. We provide coupling size selection assistance (including servo inertia ratio calculations), STEP 3D CAD models, dimensional drawings, and installation guidance at no charge. Replacement intermediate discs are stocked for all standard GBC6C sizes for same-week dispatch in planned and emergency maintenance scenarios.
We supply GBC6C couplings to all Australian states and territories — NSW, VIC, QLD, WA, SA, TAS, ACT, and NT — via tracked freight. Standard in-stock orders dispatch within 2–3 business days. Standard products in original condition may be returned within 30 days. Custom-specification orders are subject to prior approval for return or exchange.
Have a specific bore combination, custom material requirement, or application to discuss? Contact the GBC engineering and sales team — we respond within one business day with confirmed selection and pricing.
Frequently Asked Questions — GBC6C Series Clamp Type Oldham Coupling
Request a Quote or Technical Datasheet for the GBC6C Clamp Type Oldham Coupling
Send us your shaft diameters (d1 and d2), required frame size, application torque and speed — our team will confirm the correct bore combination, disc material, and pricing within one business day.
Clamp Type Oldham Coupling — split-hub clamp fixation for superior shaft grip, zero backlash, high torsional stiffness. Rated torque 0.7–80 N·m, max speed 9,000 rpm, radial misalignment up to 3.9 mm, angular tolerance 3°. 8 sizes (EP6C-16 to EP6C-70). Stocked and shipped Australia-wide by GBC.


